從成像探測系統的兩個(gè)應用背景來(lái)看,弱小目標跟蹤測量面臨的難點(diǎn)主要有兩個(gè):一是航空導航是成像探測系統最早也是最成功的應用領(lǐng)域,由于航空器與成像系統距離較遠,目標在成像平面上僅占有幾個(gè)像元,加上成像系統接收到的目標輻射強度很弱,且易受各種噪聲雜波的干擾;二是天文目標跟蹤也是成像探測系統的一個(gè)重要應用。在天文觀(guān)測時(shí),由于目標能量較弱,基本上被噪聲淹沒(méi),信噪比低,并且目標出現的位置、大小和速度均未知,加上無(wú)紋理等特征可以利用,這些因素給弱小目標跟蹤測量帶來(lái)極大的挑戰,同時(shí)由于天文圖像數據量大,及時(shí)有效地處理這些海量數據,需要借助于圖像處理、數據挖掘、信號處理等信息處理技術(shù)。上述的應用領(lǐng)域,由于各種客觀(guān)因素的存在將導致目標易被背景雜波淹沒(méi),因此弱小目標跟蹤測量算法的好壞將直接決定光電成像系統的有效作用距離。
光電所光電探測與信號處理研究室研究團隊致力于光電成像目標的檢測與跟蹤算法的研究。針對低信噪比場(chǎng)景下弱小目標跟蹤測量問(wèn)題,課題組提出了改進(jìn)的粒子濾波跟蹤方法:首先通過(guò)空間位置加權的方式來(lái)獲取灰度特征,并將鄰域運動(dòng)模型和灰度概率圖相結合來(lái)獲取弱小目標運動(dòng)特征,然后構建灰度與運動(dòng)特性的聯(lián)合觀(guān)測模型來(lái)計算粒子權值。同時(shí)在跟蹤測量過(guò)程中考慮到目標的灰度分布特性并不穩定,加入了自適應更新參考目標灰度模板的策略,最后采用幾組場(chǎng)景來(lái)驗證本文算法的跟蹤測量效果。實(shí)驗證明,和傳統算法相比,該算法增強了低信噪比場(chǎng)景下弱小目標跟蹤測量能力。
近兩年該課題組取得的最新研究成果包括基于L1-L0的生物活體組織圖像的自動(dòng)分割與分析技術(shù),管徑自適應的時(shí)空域濾波的弱小目標檢測算法,序列圖像局部能量極大值的弱小目標檢測算法,樣本自適應免疫遺傳粒子濾波弱小目標跟蹤算法,改進(jìn)粒子濾波弱小目標跟蹤等,相應的內容發(fā)表在《Biomedical Optics Express》和《Infrared Physics and Technology》等國際知名期刊上。
本研究相關(guān)論文發(fā)表在《光電工程》2018年第8期上,引用格式如下:樊香所, 徐智勇, 張建林. 改進(jìn)粒子濾波的弱小目標跟蹤[J]. 光電工程, 2018, 45(8): 170569. DOI: 10.12086/oee.2018.170569。
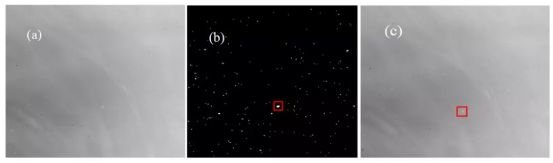
跟蹤測量結果圖: (a) 第1幀;(b) 運動(dòng)模型圖;(c) 跟蹤測量圖