隨著科技的日益發(fā)展特別是尖端科技的發(fā)展,大運動范圍的跟蹤(粗跟蹤)應(yīng)用也從靜平臺發(fā)展到了動平臺上,這就要求粗跟蹤設(shè)備向著小型化、智能化的趨勢發(fā)展并且要求跟蹤設(shè)備精度高且功耗低。由于齒輪傳動有著功耗低且體積小等優(yōu)點,越來越多的設(shè)計者傾向于尋求齒輪附加電機的設(shè)計。因此,在現(xiàn)代伺服系統(tǒng)中,常采用低功率直流電動機與齒輪箱相結(jié)合以獲得高轉(zhuǎn)矩。然而,齒輪傳動控制不可避免地也給系統(tǒng)帶來了一些新的問題,如齒隙和非線性摩擦,這些非線性擾動會嚴重影響系統(tǒng)跟蹤精度。
中國科學院光電技術(shù)研究所光束控制重點實驗室亓波課題組提出一種基于傳感器融合的不依賴模型的擾動觀測器(DOB)控制方法,實現(xiàn)對非線性擾動抑制,提高了控制系統(tǒng)閉環(huán)性能。該方法利用電機端編碼器為電機轉(zhuǎn)速測量反饋元件測得電機轉(zhuǎn)速和負載端編碼器為負載轉(zhuǎn)速測量元件測得負載轉(zhuǎn)速,再利用所測得的速率偏差來實施這種DOB的干擾,與位置信號相比,負載和電機之間的速率偏差可以快速的顯示出行星齒輪系統(tǒng)中存在的擾動以提高齒輪驅(qū)動控制系統(tǒng)的位置控制的閉環(huán)性能。而由于電機速度閉環(huán)的高帶寬,則不需要該裝置的逆模型。因此,這種DOB控制方法不需要對系統(tǒng)進行復雜的建模。相比于傳統(tǒng)控制方法,跟蹤精度有很大的提高。
相關(guān)研究成果發(fā)表在國際重要期刊《sensors》上,論文鏈接:http://www.mdpi.com/1424-8220/18/3/754
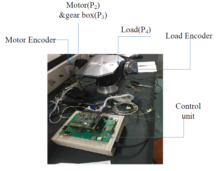
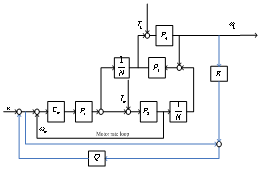
圖1 基于傳感器融合的不依賴模型的擾動觀測器控制(Mode-Free DOB)
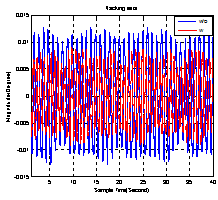
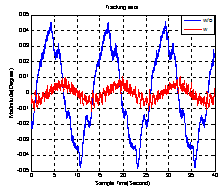
圖2 基于傳感器融合的不依賴模型的擾動觀測器(DOB)控制方法和傳統(tǒng)控制方法位置跟蹤誤差比較