近日,在國家自然基金和中科院青年創(chuàng)新促進(jìn)會的支持下,針對任意不具有合作信息的目標(biāo),光電所空天光電技術(shù)事業(yè)部趙汝進(jìn)博士帶領(lǐng)的視覺測量研究小組,提出了一種基于旋轉(zhuǎn)參數(shù)的高精度位姿測量方法。該方法首先利用Cayley-Gibbs-Rodriguez (CGR)對旋轉(zhuǎn)矩陣進(jìn)行參數(shù)化,然后將位姿測量問題轉(zhuǎn)化為旋轉(zhuǎn)參數(shù)的最優(yōu)化問題,最后利用自動求解Gr?bner基方法對旋轉(zhuǎn)參數(shù)這一最優(yōu)化問題進(jìn)行求解,實現(xiàn)了針對任意數(shù)量特征點在不同排布下的位姿測量。相比傳統(tǒng)位姿測量方法,該方法通用性更強(qiáng)且精度得到近一步提高。該項研究成果有望應(yīng)用在未來的空間任意目標(biāo)測量任務(wù)中,也可推廣應(yīng)用在工業(yè)制造,醫(yī)療輔助、機(jī)器人導(dǎo)航等領(lǐng)域。
仿真實驗和實際實驗驗證了所提出算法的有效性和魯棒性。圖1是仿真實驗誤差比較,圖2是實際圖片位姿測量結(jié)果。
相關(guān)研究成果發(fā)表在Elsevier旗下的著名測量期刊《Measurement》上,論文鏈接:https://www.sciencedirect.com/science/article/pii/S026322411830099X
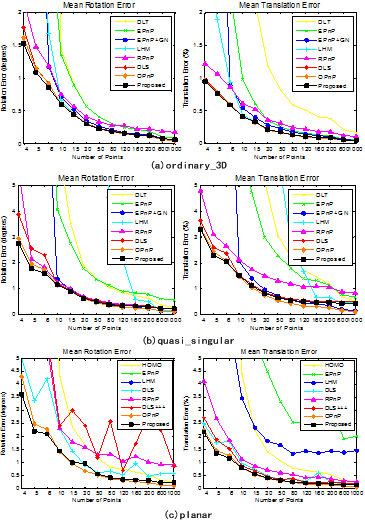
圖1 不同配置的平均旋轉(zhuǎn)和位移誤差的比較:(a)普通三維情況;(b)準(zhǔn)奇異情況;(c)平面情況
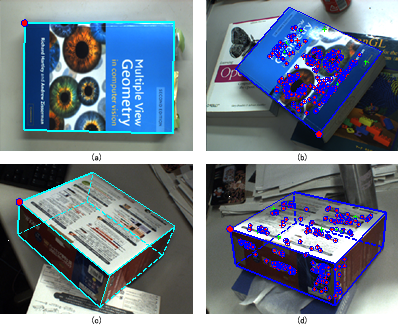
圖2 實際圖片的位姿測量結(jié)果(其中綠色標(biāo)志“+”為匹配異常值,紅色標(biāo)記“+”是特征點集,而利用所提出的算法得到的目標(biāo)姿態(tài)對目標(biāo)進(jìn)行重投影后的點標(biāo)記為藍(lán)色 “o”。)