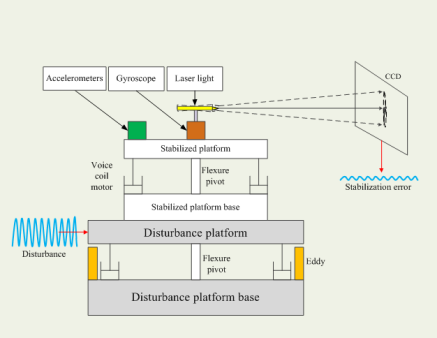
快反鏡作為光學(xué)精密跟蹤控制系統的核心部件已經(jīng)廣泛應用于長(cháng)距離激光通信、自適應光學(xué)、太空望遠鏡系統等前沿光學(xué)系統上。隨著(zhù)應用領(lǐng)域的不斷擴大,其逐漸被安裝在航天器、飛機、汽車(chē)等運動(dòng)平臺上。運動(dòng)平臺上基座的擾動(dòng)會(huì )直接傳遞到快反鏡鏡面上,從而降低偏轉光束的穩定跟蹤精度,極大的破化系統性能。運動(dòng)載體上的擾動(dòng)為寬頻段,傳統的控制方法的抗擾能力有限,無(wú)法滿(mǎn)足更高要求的穩定控制要求。
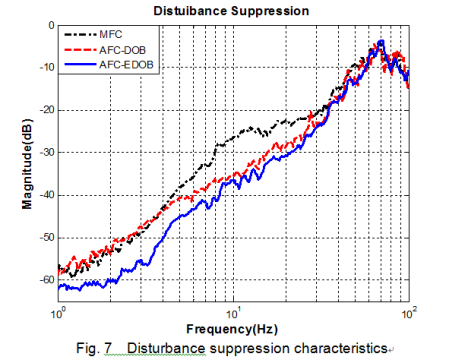
中國科學(xué)院光電技術(shù)研究所光束控制重點(diǎn)實(shí)驗室任戈、毛耀課題組在運動(dòng)平臺快反鏡光束精密穩定控制方法研究上取得進(jìn)展。分別提出一種基于擾動(dòng)加速度估計補償的快反鏡控制方法和一種增強的基于加速度測量的擾動(dòng)觀(guān)測器控制器方法,有力的增強的系統的主動(dòng)擾動(dòng)隔離能力,提高了跟蹤控制性能。該系列研究成果發(fā)表在近期的Sensors和IEEE Photonics Journal期刊上。
該研究得到了國家自然科學(xué)基金委、科技部、中科院等項目的支持。
文章下載鏈接:
http://www.mdpi.com/1424-8220/16/11/1920
http://ieeexplore.ieee.org/document/7904704/