該方法在對噪聲像素點(diǎn)進(jìn)行估計時(shí),采用了邊緣和紋理信息替代原始的距離信息,來(lái)確定計算中參考像素點(diǎn)的權重,而邊緣和紋理的權重分別由方向梯度和方差系數來(lái)決定。在選取含噪圖像中待處理點(diǎn)(即基準點(diǎn))的參考點(diǎn)時(shí),考慮參考點(diǎn)與基準點(diǎn)如果都處于紋理區域,就應該減小此時(shí)的濾波強度,以達到保存紋理的效果。為此該方法中引入紋理度量因子,此因子值越大,像素鄰域的紋理越豐富;同時(shí),為了在去噪時(shí)盡量保存圖像邊緣信息,對原圖像進(jìn)行邊緣檢測。根據邊緣檢測的結果,對于一個(gè)處于邊緣的基準點(diǎn)在尋找其參考點(diǎn)時(shí),如果某一個(gè)參考點(diǎn)也為邊緣點(diǎn),即說(shuō)明這兩點(diǎn)的相似度很可能比參考點(diǎn)為平滑區域點(diǎn)時(shí)的相似度高,因此此時(shí)在權重中再加入兩點(diǎn)鄰域的方向梯度的相似性因子。結合以上兩點(diǎn)的改進(jìn),最終得到改進(jìn)算法中參考點(diǎn)對于基準點(diǎn)的加權權重計算公式。
經(jīng)實(shí)驗驗證,對于不同程度的不同含噪圖像的處理效果,新的算法相比原算法的SSIM評價(jià)值平均提升7.6%;通過(guò)對不同圖像進(jìn)行實(shí)驗,表明改進(jìn)后新的算法比傳統的非局部均值濾波算法具有更高的SSIM客觀(guān)評價(jià)值和更好的主觀(guān)評價(jià)結果。
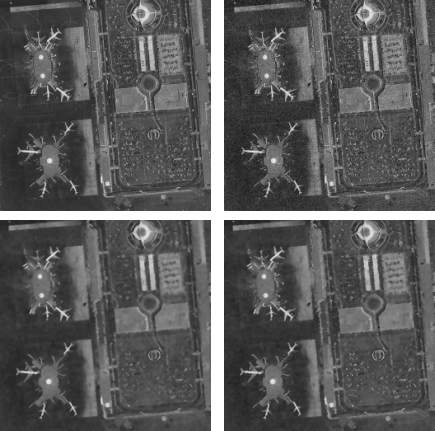
Fig: (Left to right, up to bottom) image ‘lax’
original image, noisy image, denoised by NLM, denoised by our method
noise std=18